
Der Bau meines Arduino Snow Plow Roboters geht weiter, hier im zweiten Teil gehe ich näher auf die Elektronik und die benötigten Komponenten ein.
Arduino, Relais, Shields, Motorbrücken (H-Brücken), Elektronik
Arduino Mega 2560
Reserve schadet nie und auf die paar Euro kommt es bei der Gesamtsumme nicht an, also hab ich den Arduino Mega 2560 genommen, dieser bietet genug Anschlussmöglichkeiten und die etwas größeren Abmessungen im Vergleich zum Arduino Nano oder Uno sind egal.
Spannungsregler für 5V
Ein Spannungsregler regelt eine variable Eingangsspannung auf eine feste Ausgangsspannung, der Arduino wird mit 5V Betrieben, daher verwende ich auch einen Spannungsregler für 5V um die 12V Eingangsspannung zu reduzieren.
Motorbrücken, Motoren und Linearantriebe
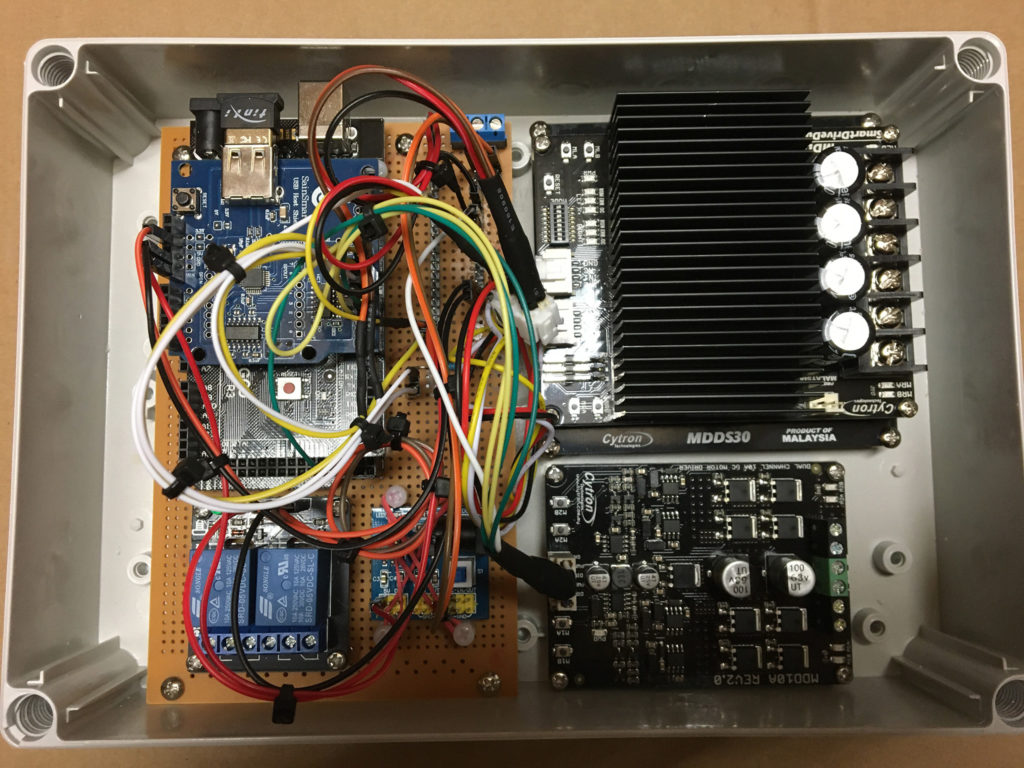
Cytron SmartDriverDuo-30 MDDS30 an Arduino für den Antrieb
Die Motorbrücke oder H-Brücke für die Antriebsmotoren würde ich als wichtigstes Teil der Elektronik Komponenten bezeichnen, hier läuft die größte Last drüber. Die Motoren ziehen 11A bei Volllast, Spitzen können auch mal deutlich darüber liegen. Daher habe ich die Cytron SmartDriverDuo-30 MDDS30, 2 Kanal Motorbrücke mit 30A Dauerbelastung und 80A Spitzenstrom je Kanal gewählt. Die Motorbrücke verfügt über einen großen Kühlkörper und es könnte zusätzlich noch ein Lüfter montiert werden. Gesteuert wird die Fahrtrichtung über einen der Joysticks auf dem Playstation Controller.
Cytron 10A 5-30V an Arduino für die Linearantriebe
Die Linearantriebe arbeiten mit einem Schneckengetriebe, dadurch haben sie viel Kraft bei einer vergleichsweise niedrigen Motorleistung. Hierfür reicht die von mir verwendete 2 Kanal Motorbrücke Cytron 10A locker aus. Die Linearantriebe werden mit 12V betrieben. In meinem Sketch habe ich es so programmiert das das Schild sich solange in die jeweilige Richtung bewegt wie die Taste gedrückt wird. Lasse ich die Taste wieder los stoppt das Schild wieder. Hierfür verwende ich die Pfeiltasten.
USB Host und Bluetooth für den PS3 Controller am Arduino (PS3BT)
Wie bereits in Arduino Snow Plow Episode 1 erwähnt verwende ich zur Steuerung des Schneeräum Roboters einen Playstation 3 Controller. Dank der guten Arduino Community sind bereits funktionierende Librarys für Einbindung des Controllers in den Programmcode vorhanden. Um die Komponenten nutzen zu können muss zunächst die Library installiert werden und anschließen in den Sketch included werden.
Der einfachste Weg den Arduino mit Bluetooth auszustatten ist ein USB Host Shield, hier habe ich das von SainSmart verwendet, dieses funktioniert auf dem Arduino Mega 2560 wirklich gut. Ausserdem braucht Ihr noch einen Bluetooth Dongel. Für größere Reichweiten besteht auch die Möglichkeit die Fernsteuerung mit XBee Modulen zu realisieren. Der Zeit- und Kostenaufwand ist bei XBee Modulen allerdings höher und für meinen Zweck ist die Bluetooth Reichweite absolut ausreichend.
Relaismodul für Licht und zusätzliche Geräte
Auch das Licht soll bequem mit dem Playstation Controller ein und ausgeschaltet werden, zudem wollte ich einen zweiten schaltbaren Kreis für eventuelle Zusatzspielereien. Mit einem 2 Kanal Relaismodul welches auch über den Arduino gesteuert wird, kann ich Licht und Zusatzgeräte nun steuern. Ich steuere das Licht mit der Dreieck und Kreistaste.
Sicherungen und Schalter
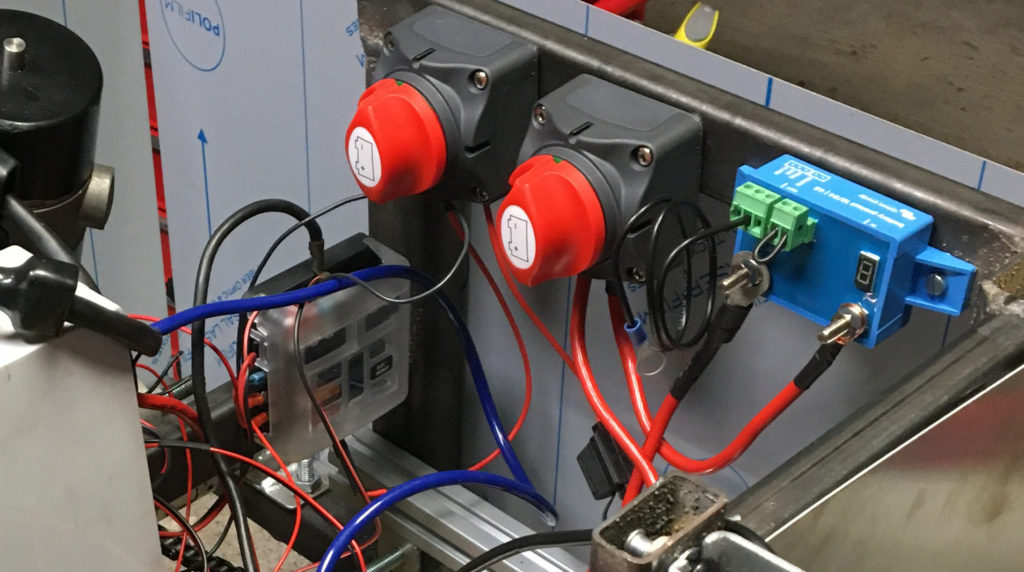
Kommen wir zu einem sehr wichtigen Thema, Sicherungen und Schalter, eine Autobatterie kann sehr hohe Stromstärken liefern das sorgt für eine nicht unerhebliche Gefahr. Das allerwichtigste ist zunächst mal die Batterie mit einer entsprechenden Sicherung abzusichern. Dazu habe ich einen Sicherungshalter aus dem Car Audio Bereich verwendet und eine 60A Sicherung eingesetzt. Danach kommen die Trennschalter einmal für den 24V Kreis und einen für den 12V Stromreis, wobei der 12V Stromkreis eine eigene Vorsicherung hat. Die Trennschalter stammen aus dem KFZ Bereich und können bis zu 300A schalten. Hier reicht auch eine kleinere Ausführung, erst recht für den 12V Kreis. Optische Gründe haben hier meine Entscheidung mit beeinflusst.
Die einzelnen Komponenten habe ich zusätzlich nochmal getrennt abgesichert, je nach maximaler Stromstärke habe ich die Sicherungen entsprechend ausgelegt. Für die Montage der Sicherungen verwende ich eine kleine Sicherungsbox aus dem Bootsbereich. Die Sicherungsbox verfügt außerdem über eine Masseklemme diese wird benötigt um die einzelnen Masse Anschlüsse mit der Batterie zu verbinden.
Batterie Tiefentladeschutz um die Lebensdauer der Batterien zu verlängern
Wie Ihr bereits in der ersten Episode erfahren habt habe ich zudem noch einen Batterie Guard installiert. Ein Batterie Guard oder Tiefenentladeschutz misst die Spannung, fällt diese unter einen eingestellten Schwellwert wird ein Alarm ausgeben. Wenn die Spannung sich nun nicht erholt und weiter sinkt wird die Spannungsversorgung getrennt also der ganze Roboter ausgeschaltet. Batterien gehen kaputt wenn diese zu tief entladen werden. Der von mir verwendete Batterie Tiefentladeschutz von Victron kann bis 65A eingesetzt werden, hier gibts vom Hersteller auch noch größere Modelle. Ich könnte sogar auf den Trennschalter im 24V System verzichten da der Victron Battery Protect einen Remote Eingang besitzt, über diesen kann ein einfacher Schalter genutzt werden um das System zu trennen.
In der nächsten Episode geht es dann weiter mit der Programmierung und weiteren Details.
Das Arduino Snow Plow Project:
- Arduino Snow Plow Schneeräum Roboter Episode-1
- Arduino Snow Plow Schneeräum Roboter Episode-2
- Arduino Snow Plow Schneeräum Roboter Episode-3





2 Kommentare